Что значит синхронный двигатель
Синхронные и асинхронные двигатели, их отличия и разница в применении
 Электродвигатели — машины, превращающие энергию электричества в механическую. Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма. Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Электродвигатели — машины, превращающие энергию электричества в механическую. Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма. Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
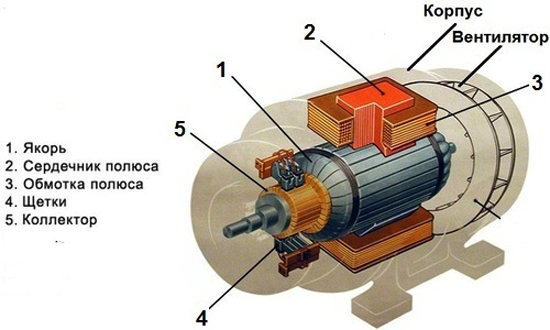
 Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
 Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
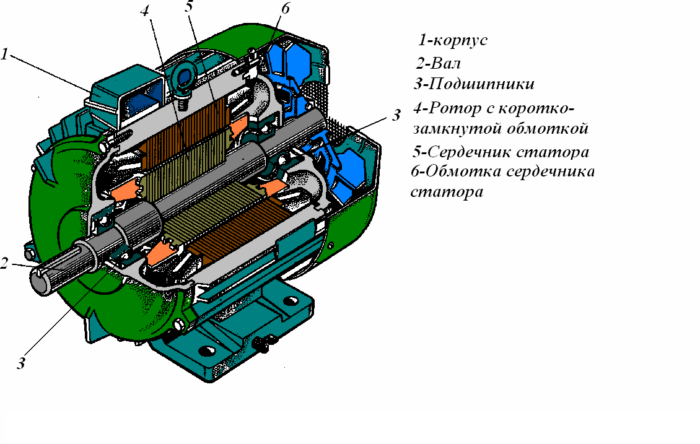
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Отличие в характеристиках электродвигателей
Конструктивные особенности и рабочие характеристики электродвигателей имеют решающее значение при выборе агрегатов. От этого зависит проектирование трансмиссий и всех силовых узлов механизмов. При выборе двигателя нужно опираться на общность и главные отличия в свойствах машин:
 Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.
Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.- У синхронных двигателей частота вращения вала постоянна, у асинхронников она может изменяться при изменении нагрузки.
- У синхронников отсутствует пусковой момент. Для входа в синхронизацию требуется применять асинхронный пуск.
Синхронный и асинхронный электродвигатели находят каждый своё применение. Синхронные двигатели рекомендуется использовать везде при высоких мощностях, где присутствует непрерывный производственный процесс и не нужно часто перезапускать агрегаты или регулировать частоту вращения. Они используются в конвейерах, прокатных станах, компрессорах, камнедробилках и т. д. Современный синхронный электродвигатель имеет такой же быстрый запуск, как и асинхронный, но он меньше и экономичнее, чем асинхронный, равный по мощности.
Асинхронные электродвигатели с фазным ротором применяются там, где нужен большой пусковой момент и частые остановки агрегатов. Например, в лифтах и башенных кранах. Асинхронные электродвигатели с короткозамкнутым ротором получили широкое применение из-за простоты устройства и удобства в эксплуатации.
Используя достоинства разных агрегатов и то, чем отличается синхронный двигатель от асинхронного, можно делать обоснованный выбор того или иного мотора при проектировании машин, станков и другого оборудования.
Синхронные двигатели | двигатели переменного тока – Учебник – 2020
Принцип работы синхронного электродвигателя (Март 2020).
Синхронные двигатели
Глава 13 – Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного времени, таких как тайм-аут, часы и проигрыватели. Несмотря на то, что батареи с кварцевым аккумулятором с батарейным питанием широко доступны, линейка AC с линейным управлением имеет более долгосрочную точность – в течение нескольких месяцев. Это связано с тем, что операторы электростанций намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока. Если он отстает на несколько циклов, они составят потерянные циклы AC, чтобы часы не теряли времени.
Большие и малые синхронные двигатели
Выше 10 лошадиных сил (10 кВт) более высокая эффективность и ведущий фактор мощности делают большие синхронные двигатели полезными в промышленности. Крупные синхронные двигатели на несколько процентов эффективнее, чем более распространенные асинхронные двигатели. Хотя синхронный двигатель более сложный.
Поскольку двигатели и генераторы схожи по конструкции, следует использовать генератор в качестве двигателя, наоборот, использовать двигатель в качестве генератора. Синхронный двигатель похож на генератор с вращающимся полем. На рисунке ниже показаны небольшие генераторы с полем вращения с постоянным магнитом. На этом рисунке ниже могут быть два параллельных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, или генератор переменного тока, управляющий синхронным двигателем. Или это могут быть два двигателя, если подключен внешний источник питания. Дело в том, что в любом случае роторы должны работать на одной и той же номинальной частоте и находиться в фазе друг с другом. То есть, они должны быть синхронизированы . Процедура синхронизации двух генераторов состоит в том, чтобы (1) открыть переключатель, (2) включить оба генератора с одинаковой скоростью вращения, (3) продвинуть или затормозить фазу одного блока, пока оба выхода переменного тока не будут в фазе, (4) закройте переключатель, прежде чем они выйдут из фазы. После синхронизации генераторы будут заблокированы друг от друга, требуя значительного крутящего момента, чтобы сломать один блок (независимо от синхронизации) от другого.

Синхронный двигатель работает с генератором.
Учет момента с синхронными двигателями
Приведение синхронных двигателей до скорости

Sinewave управляет синхронным двигателем. Предполагая, что двигатель до синхронной скорости, так как синусоидальная волна изменяется на положительную величину на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, а верхняя южная катушка привлекает этот северный полюс ротора. Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке. К тому моменту, когда синусоидальная волна достигает пика при (2), крутящий момент, удерживающий северный полюс ротора вверх, максимален. Этот крутящий момент уменьшается, когда синусоидальная волна уменьшается до 0 В постоянного тока при (3) с минимальным крутящим моментом. Когда синусоидальная волна изменяется на отрицательную между (3 и 4), нижняя южная катушка толкает южный роторный полюс, притягивая полюс северного ротора ротора. Аналогичным образом, северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. На (4) синусоидальная область достигает отрицательного пика с удерживающим моментом снова максимум. Поскольку синусоидальная волна изменяется с отрицательного на 0 V DC на положительный, процесс повторяется для нового цикла синусоидальной волны. Обратите внимание, что на приведенном выше рисунке показано положение ротора для условия без нагрузки (α = 0 o ). На практике загрузка ротора приведет к тому, что ротор будет отставать от позиций, обозначенных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не достигнет значения α = 90 o . Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует при чередовании полярности. Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием. Так как катушечное поле пульсирует и не вращается, необходимо довести ротор постоянного магнита до скорости с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, аналогичный описанному в следующем разделе.


Одновитковый 12-полюсный синхронный двигатель. Вместо того, чтобы наматывать 12-катушки для 12-полюсного двигателя, намотайте одну катушку с двенадцатью обмотками стальных полюсов, как показано на рисунке выше. Хотя полярность катушки чередуется из-за примененного переменного тока, предположим, что верхний край находится на север, нижний юг. Частицы полюсов направляют южный поток снизу и снаружи катушки вверх. Эти 6 юг чередуются с 6-северными язычками, изогнутыми вверх от вершины стального полюса катушки. Таким образом, стержень с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-циклам переменного тока при одном физическом вращении стержневого магнита. Скорость вращения будет составлять 1/6 от электрической скорости переменного тока. Скорость вращения ротора будет 1/6 от того, что испытывает двухполюсный синхронный двигатель. Пример: 60 Гц будут вращать 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.

Перепечатано с разрешения Westclox History на www.clockHistory.com Статор (Figabove) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция похожа на предыдущий рисунок с одной катушкой. Один тип катушки конструкции экономичен для двигателей с малым крутящим моментом. Этот двигатель с частотой вращения 600 об / мин приводит в движение редукторы, двигающие часами. Если бы двигатель Westclox работал с частотой 600 об / мин от источника питания 50 Гц, сколько полюсов потребуется «52018.jpg»>

Перепечатано с разрешения Westclox History на www.clockHistory.com Ротор (Figabove) состоит из постоянного магнита и стальной асинхронной моторной чашки. Синхронный двигатель, вращающийся внутри полюсных выступов, сохраняет точное время. Чашка асинхронного двигателя вне стержневого магнита подходит снаружи и над вкладками для самостоятельного запуска. В свое время были изготовлены несамоходные двигатели без асинхронного двигателя.
Трехфазные синхронные двигатели

Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели

Электронный синхронный двигатель На блок-схеме (рисунок) показана электроника привода, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока ). Эти двигатели имеют датчик положения, встроенный в двигатель, который обеспечивает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя. Датчик положения может быть таким же простым, как датчики магнитного поля твердого тела, такие как устройства эффекта Холла, обеспечивающие коммутацию (направление тока якоря) в электронику привода. Датчик положения может быть угловым датчиком с высоким разрешением, таким как резольвер, индуктосин (магнитный кодировщик) или оптический кодер. Если требуется постоянная и точная скорость вращения (как для дисковода), может быть включен тахометр и фазовая автоподстройка . (Figurebelow) Этот сигнал тахометра, последовательность импульсы пропорциональны скорость двигателя, подаются обратно в контуре фазовой автоподстройки, который сравнивает частоту и фазу тахометра на стабильный источник опорной частоты, такие как кварцевый генератор.

Контур фазовой автоподстройки частоты контролирует синхронную скорость двигателя.
Бесщеточный двигатель постоянного тока

Момент вращения двигателя и механический аналог. Момент пульсации или зубчатый зазор обусловлены магнитным притяжением полюсов ротора к кускам полюса статора. (Рисунок выше) Обратите внимание, что нет катушек статора, даже не мотор. Ротор ПМ может вращаться вручную, но при приближении к ним он будет притягиваться к полюсным наконечникам. Это аналогично механической ситуации. Момент пульсации будет проблемой для двигателя, используемого в проигрывателе «Resolver»>

Обмотки, распределенные в поясе, создают более синусоидальное поле. Если двигатель приводится в действие синусоидальным током, синхронным с обратной эДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли сигналы возбуждения электронными средствами. Синхронный двигатель генерирует синусоидальную заднюю э. Д. С., Если магнитное поле статора имеет синусоидальное распределение. Он будет более синусоидальным, если полюсные обмотки распределены в поясе (рис. Выше) на многих слотах вместо сосредоточения на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Эта компоновка отменяет нечетные гармоники поля статора. Слоты, имеющие меньшее количество обмоток на краю фазовой обмотки, могут разделять пространство с другими фазами. Наматывающие ремни могут иметь альтернативную концентрическую форму, как показано на рисунке ниже.

Концентрические ремни. Для двухфазного двигателя, управляемого синусоидой, крутящий момент является постоянным на всем протяжении тригонометрического тождества: Генерация и синхронизация сигнала возбуждения требуют более точной индикации положения ротора, чем датчики эффекта холла, используемые в бесщеточных двигателях постоянного тока. Преобразователь, или оптический или магнитный кодер обеспечивает разрешение от сотен до тысяч частей (импульсов) за оборот. Резольвер обеспечивает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Кодеры обеспечивают цифровую индикацию углового положения в серийном или параллельном формате. Привод синусоидальной волны фактически может быть от PWM, модулятора широтно-импульсной модуляции, высокоэффективного метода приближения синусоидальной формы к цифровой форме волны. (Рис. Ниже). Каждая фаза требует, чтобы электроника привода для этой формы волны сдвигалась на фазу на соответствующее количество на фазу.
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
Строение синхронного двигателя
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
 Строение синхронного двигателя
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Что значит синхронный двигатель
Двигатель является устройством, преобразующим энергию в механический тип работы. Только зная функции и технические характеристики мотора, можно правильно резюмировать, чем отличается синхронный двигатель от асинхронного вида устройства.
Принцип работы синхронных и асинхронных моторов
Функционирование синхронных электродвигателей базируется на взаимодействии полюсов статора и индуктора. В пусковой момент происходит ускорение мотора до показателей вращательной скорости магнитного потока. В таких условиях устройство действует в синхронном режиме, а магнитными полями образуется особое пересечение, в результате чего происходит синхронизация.
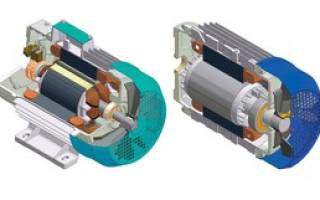
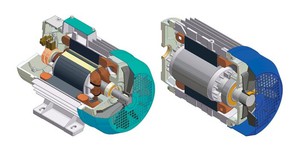
Синхронный двигатель в разрезе
Асинхронные моторы имеют частоту роторного вращения, отличную от частоты, с которой вращается магнитное поле, создаваемое в результате действия питающего напряжения. Такие двигатели не обладают автоматической регулировкой токового возбуждения.
Асинхронный двигатель в разрезе
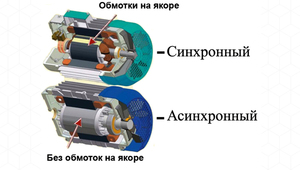
Основные отличия
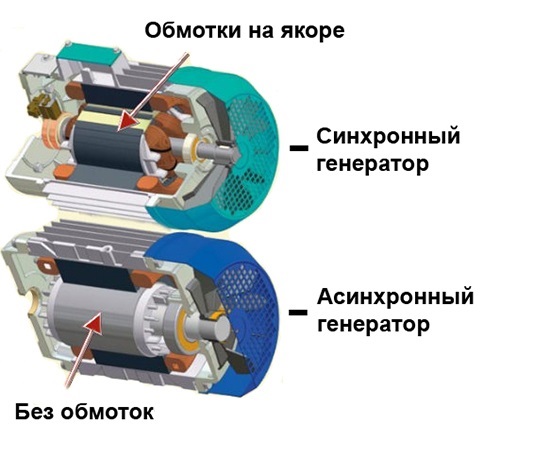
Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.
Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.
Такие устройства относятся к категории современных двигателей, обладающих высоким КПД и постоянной частотой вращения. Асинхронные моторы сложнее регулировать, а их коэффициент полезного действия недостаточно высокий. Тем не менее, второй вариант более доступен по цене.

В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.

То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.

Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.

1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.

Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.


Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
Электродвигатели бывают двух основных типов — синхронные и асинхронные. Что представляют собой те и другие?
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.
Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.

В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.